
Kaiyun官网 登录入口约翰霍普金斯大学Jochen Mueller团队最近在Device期刊发表的这项工作,给出了一个相当优雅的解法:
他们用这套方法做了一个可穿戴的手部辅助康复装置,还做了一只能爬行的仿生海龟机器人。
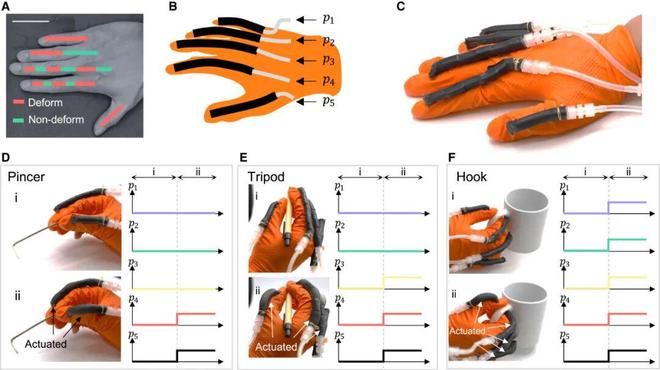
AM易道对于该文章的许多理解和表达已脱离原文章的原始技术表述,有大量原创主观的解读创作成分,如需要了解更多原始硬核技术内容,请自行阅读原文。3D打印喷嘴会变形,这件事为什么重要先说核心创新。ACS-3DP的喷嘴出口是八边形,由八根金属针尖和连接它们的柔性硅胶膜组成。针尖通过线缆连接到步进电机,电机旋转拉动线缆,针尖就向外移动;松开时,压缩弹簧把针尖拉回来。喷嘴中心有一根固定的圆柱形芯棒,硅胶墨水从芯棒和外壳之间的环形间隙挤出,形成中空纤维。
当四根针尖往外拉的幅度比另外四根大时,喷嘴出口就变成非对称形状,一侧间隙宽,一侧间隙窄。
这种壁厚差异正是充气执行器实现定向弯曲的物理基础。薄壁侧更容易膨胀,厚壁侧相对刚性更高,充气时纤维就会朝着厚壁侧弯曲。
此技术直接在挤出过程中完成,而且可以沿着打印路径实时调整,这意味着一根连续的纤维可以包含多个不同弯曲方向的关节段。
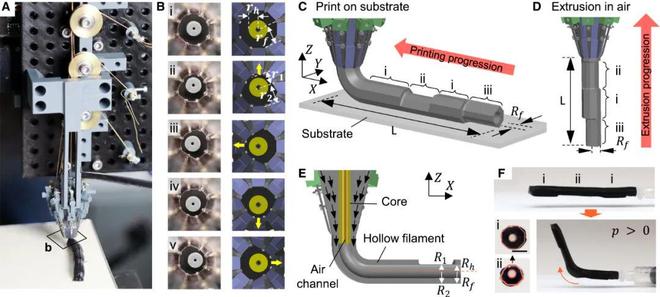
看B图底部那排喷嘴出口的俯视图:中间那个是对称的圆环,挤出来的纤维壁厚均匀,充气时哪儿都不弯,这就是固定段;
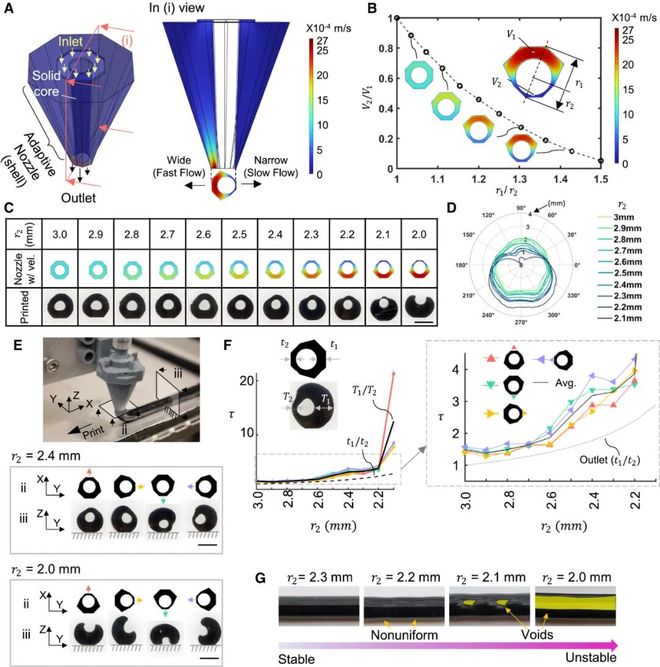
非对称喷嘴带来一个工程问题:窄间隙侧的流动阻力大,墨水流速慢;宽间隙侧阻力小,流速快。
为了验证这个效应并排除喷嘴控制误差的干扰,他们专门制作了一系列固定截面的喷嘴复制品进行对照实验。
从几何到力学:设计空间有多大壁厚分布确定后,执行器的弯曲角度和驱动力就成了设计参数这部分团队用有限元分析做了系统的参数扫描。
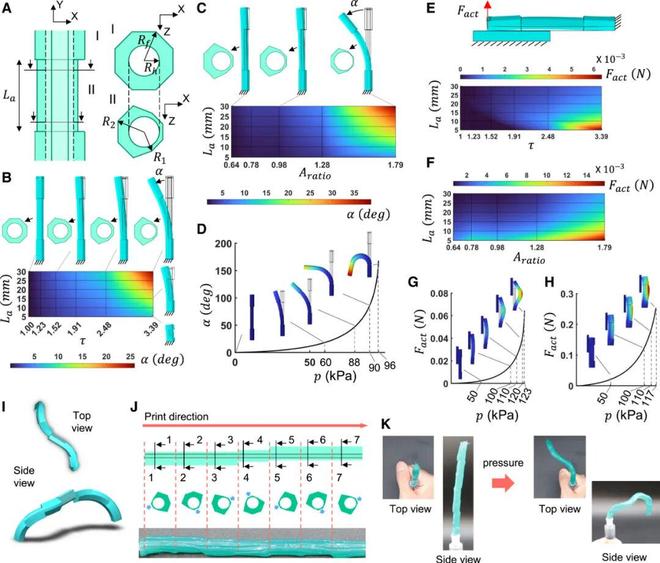
B图和C图的热力图给出了答案—变形段越长、壁厚差越大、内孔占比越高,弯曲角度就越大。
设计一根七段纤维,每段旋转方向差90度,打印出来充气,真的扭成了三维螺旋。
五根纤维分别对应五根手指,每根纤维的固定段对准手指骨节,变形段对准关节。
五路独立气压控制实现了不同抓握模式—捏握(p4、p5)、三指握(p3、p4、p5)、钩握(p1到p5)。
Mueller团队的方案是:用单一气压源驱动单根纤维,但通过设计不同段的壁厚差异,让各段在不同气压区间依次激活。
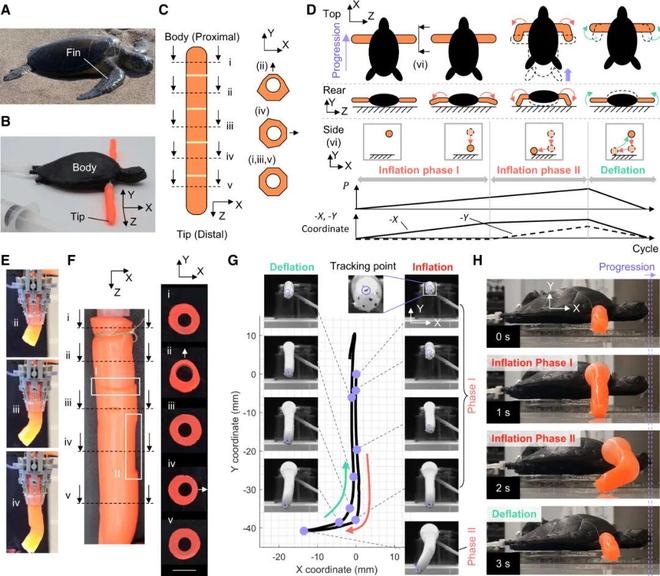
看D图的时序分解:气压刚上来时,壁厚差大的ii段先弯,鳍肢抬起;气压继续升高,壁厚差小的iv段才开始弯,鳍肢向前推。
AM易道观点:这项技术的价值和边界在哪里从技术角度看,本文核心贡献是把壁厚控制从离散的多步工艺变成了连续的实时调控。不仅提升了设计自由度,还降低了复杂执行器的制造门槛。一根包含多个异向弯曲段的纤维,传统方法可能需要多次脱模和粘接,3D打印一步完成。
其次,单根纤维只能实现单自由度弯曲,复杂运动仍然需要巧妙的段设计或多纤维配合。
把喷嘴形状从固定参数变成动态控制变量,把截面几何从单一形态变成沿路径连续分布的设计空间。
这种思路对FDM或者DIW工艺的应用,比如梯度材料、功能化纤维、甚至生物支架,都有启发意义。
对于正在探索软体执行器、柔性机器人、或者任何需要精确控制中空结构的3D打印从业者来说,这篇论文值得细读。

AMYD.CN您可以在网页上读到公测版AM易道了!早期注册用户和私信提交bug者会有隐藏福利!
招聘全职编辑:5年以上3D打印行业经验,不限专业方向。期待与有深度思考能力、文字能力和创作兴趣的小伙伴合作,共同打造优质内容。有意者请加yihanzhong详聊。
欢迎向AM易道投稿,欢迎关于3D打印的深度原创内容,有意者请加yihanzhong详聊。
读者加群提示:添加amyidao加入读者交流群(备注加群),获取原始信源链接或不便发表内容,并与AM易道同频读者共同探讨3D打印的一切,AM易道建议读者星标公众号,第一时间收到AM易道更新。
郑重免责声明:AM易道图片视频来自于网络,仅作为辅助阅读之用途,无商业目的。版权归原作者所有,如有任何侵权行为,请权利人及时联系,我们将在第一时间删除。本文图片版权归版权方所有,AM易道水印为自动添加,辅助阅读,不代表对该图片拥有版权,如需使用图片,请自行咨询版权相关方。AM易道文章不构成任何投资建议,不对因使用本文信息而导致的任何直接或间接损失承担责任。
特别声明:以上内容(如有图片或视频亦包括在内)为自媒体平台“网易号”用户上传并发布,本平台仅提供信息存储服务。
特斯拉LG中国电池包遭遇灾难性故障率警告:欧洲维修专家称寿命仅为松下电池60%
为3D打印以及人工智能从业者提供有价值的信息。(行业分析,科技树展望,竞争策略,内幕消息)
出片率100%!上海人都在找这个“限定露台”!这条“银杏大道”好拍又好吃!